分布式时钟
分布式时钟介绍和实现.
介绍
乐观并发控制技术中,需要使用时间戳来作为标识事务串行化顺序的标识符。由于在一些场景中(比如高并发低竞争),悲观并发 控制中很多锁都是没有实际用处的。乐观并发控制技术的“乐观”思想体现在其避免了没有实际用处的加锁,通过时间复用,使用时 间戳的比对来保证事务的隔离性和处理器的高利用率。
在一个单点的服务内部,可以简单的使用系统时钟,或者更严格些的话可以使用单调时钟(比如C++的std::chrono::steady_clock), 但在一个分布式系统中,节点之间的时间戳有可能有一定误差,因此需要一个时钟系统来提供(或者说保证)一个误差足够小能够满足 使用的时间戳。
时间戳获取的实现根据节点数量主要分为两种:
- 集中式时间戳:授时中心称为性能瓶颈,且单点难以实现高可用。
- 分布式时间戳:高可用,但时钟顺序维护较为复杂。
集中式时钟
有单点服务提供时间戳,可以保证时间戳的强单调性。
分布式时钟
分布式时钟主要用于生成多版本并发控制中的时间戳。
分布式系统中的时间问题:
- 每台机器有自己的时钟,如何保证不同机器的时间一致;
- 时间同步存在网络延迟,如何判断不同节点上发生的事件的先后顺序。
如果使用物理时钟:精度有限,晶体振荡器时钟存在时钟漂移;原子钟很准但是需要复杂同步。
逻辑时钟
实现:每个节点内部维护一个本地逻辑时钟,初始值为0;节点内部每发生一个事件,如事务开始,就将本地逻辑时钟的值加一。
如果节点A向节点B发送了一条消息,则节点A在发送消息时附带上本地逻辑时钟的值,节点B收到消息后, 比较自身的本地时钟 和节点A发送的本地时钟,将本地时钟更新为二者的较大值加一。
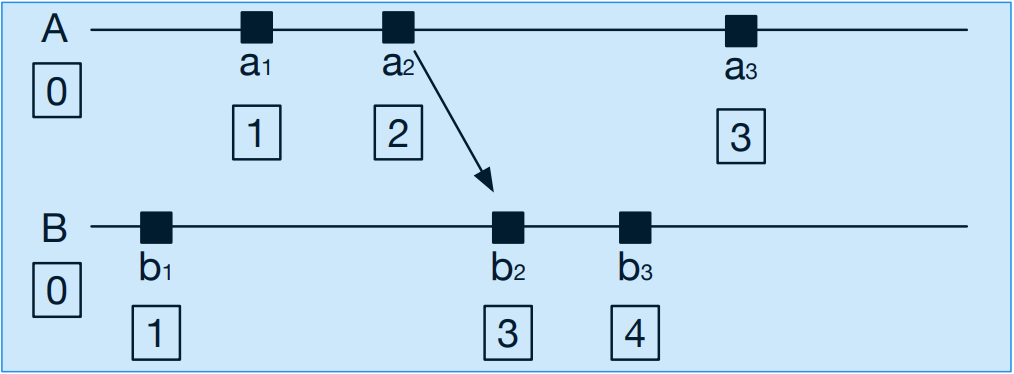
逻辑时钟
特点:只是偏序,不是全序,某些场景无法判断两个事务先后,例如两个节点之间没有消息传递。
向量时钟
实现:每个节点不仅存储本地时钟的值,还存储了其他节点的逻辑时钟;所有节点的逻辑时钟值组成一个向量,向量维度与系统 中的节点数目相同。
对于事件A和事件B对应的时钟V(A)和V(B),如果V(A) < V(B),即向量V(A)的每个分量都小于向量V(B),则可以确定事件A 发生在事件B之前。即向量时钟存在严格大小和无法区分两种状态。
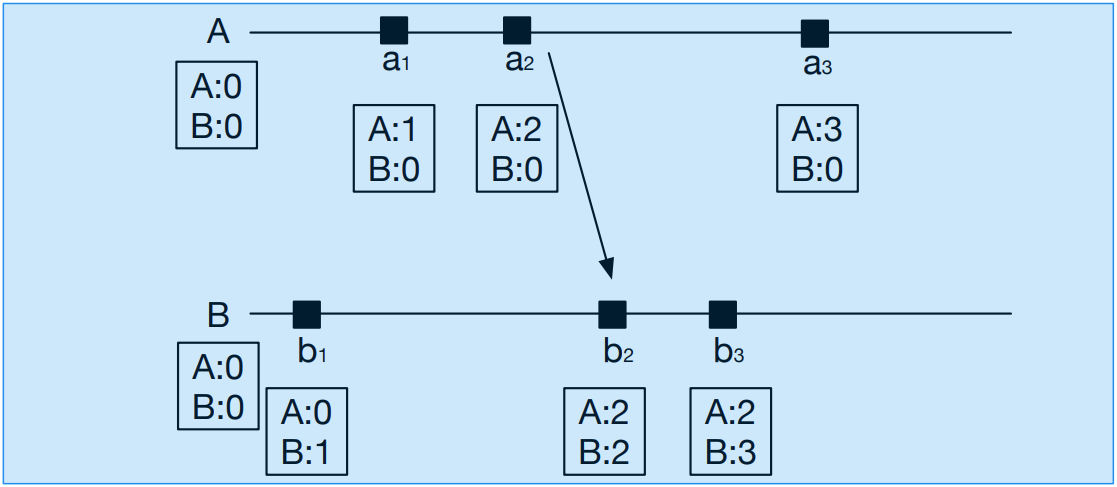
向量时钟
混合逻辑时钟
包含物理时钟和逻辑时钟,既可以如逻辑时钟一样表示事件之间的因果关系,又保证了混合逻辑时钟值与物理时钟尽可能接近。 每个混合逻辑时钟由三个标识构成,对于给定时间e:
- e.pt为事件e发生的物理时间;
- e.l表示事件e发生时所感知到的物理时钟的最大值;
- e.c用于记录事件之间的因果关系。
实现特点:
- 如果事件e发生在事件f之前,那么e的时间戳小于f的时间戳;
- 时间戳的存储空间大小是固定的,空间消耗不会随着系统节点数的增加而增大;
- 时间戳值存在上界,不会无限增长;
- 时间戳的值与物理时钟接近,二者的差值是有界的。
举个🌰:

混合逻辑时钟
TrueTime
逻辑时钟和向量时钟定义了事件之间的偏序关系而非全序关系,仍存在部分无法判断先后顺序的事件,如两个节点之间没有发生 过任何通信,则这两个节点上发生的事件无法进行先后顺序的比较。
TrueTime通过硬件(原子钟+GPS时钟)来解决时钟同步问题。每个数据中心都具有精确的原子钟,同时还可以得到GPS卫星提 供的时钟信息,两种时钟均具有较高的准确性和可靠性。
对比
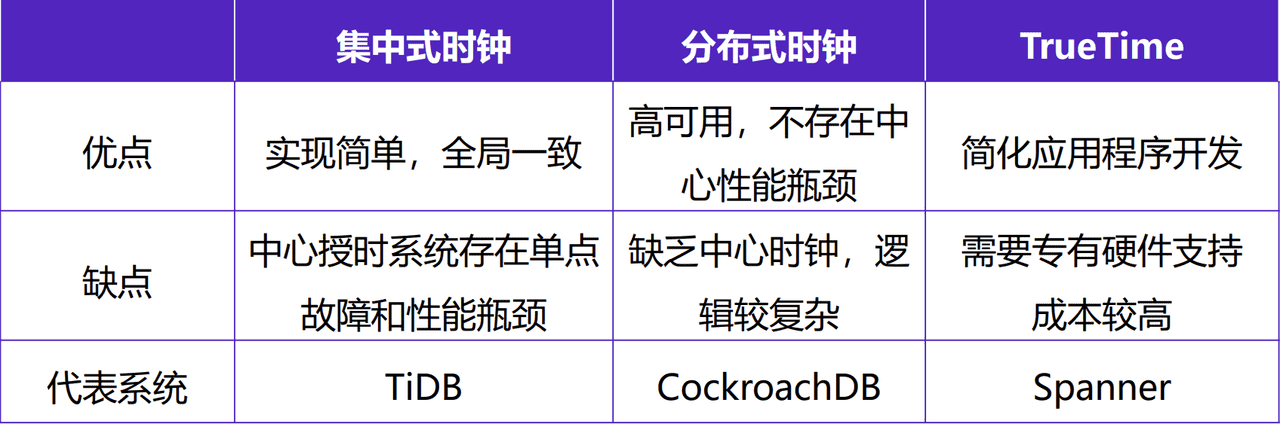
对比